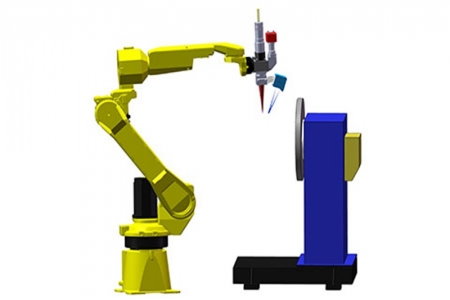
焊縫跟蹤主要采用的是激光傳感器來進行焊縫跟蹤檢測,目前的檢測方式主要用四種,每種方式都有著不同的優缺點,下面我們就來分別給大家介紹一下不同焊縫跟蹤激光傳感器的工作原理。
激光傳感器在焊縫跟蹤中的核心作用
激光傳感器通過非接觸式測量技術,實時捕捉焊縫形貌數據,為焊接機器人提供動態糾偏依據,其核心優勢包括:
高精度(微米級分辨率)
抗干擾性(適應焊接強光、煙塵環境)
實時性(毫秒級響應速度)
適應性(兼容復雜焊縫類型與材質)
四類激光傳感器的工作原理及技術細節
1. 激光位移傳感器(單點測量)
技術原理:
基于激光三角反射法,激光器發射一束點狀激光至被測物表面,反射光通過透鏡在CCD/CMOS芯片上形成光斑。通過光斑在芯片上的位置偏移(Δx),結合幾何三角關系計算距離變化(ΔZ),公式為:其中,為激光器與芯片基線距離,為透鏡焦距。
特點:
精度:±0.01mm(典型值),適用于微小位移檢測。
速度:采樣率可達10kHz,滿足高速焊接需求。
抗干擾:采用窄帶濾光片抑制弧光干擾。
應用場景:
焊縫高度跟蹤(如角焊縫余高控制)、工件裝配間隙檢測。
2. 激光測距傳感器(相位式測距)
技術原理:
對激光束進行高頻調制(通常為數十MHz至GHz),通過測量調制光波在往返被測表面時的相位差(Δφ),結合光速(c)和調制頻率(f)計算距離(D):該技術可實現遠距離(百米級)高精度測量。
特點:
量程大:覆蓋0.1m~200m,適用于大型結構件(如船舶、橋梁)的焊縫定位。
環境適應性:抗煙霧、粉塵干擾,適合戶外焊接場景。
應用場景:
長直焊縫的全局定位、多機器人協同焊接的基準校準。
3. 二維激光測量傳感器(輪廓掃描)
技術原理:
發射線激光形成光平面,照射到工件表面后形成變形光帶,通過CMOS相機捕獲光帶圖像,利用三角法逐點解算X-Z二維輪廓坐標,生成焊縫截面形狀的連續點云數據。特點:
多維度數據:同時獲取焊縫寬度、深度、坡口角度等參數。
動態補償:結合機器人運動軌跡,實時重建三維焊縫路徑。
應用場景:
復雜坡口焊縫(如V型、U型)跟蹤、多層多道焊的路徑規劃。
4. 激光位敏傳感器(PSD芯片)
技術原理:
采用位置敏感探測器(PSD),通過光斑在PSD芯片表面的能量中心坐標(X,Y)計算位置偏移,其輸出電流與光斑位置成線性關系,無需分割像素,實現無盲區連續測量。特點:
超高精度:一維分辨率達0.2μm,適用于微焊縫跟蹤(如電子器件焊接)。
響應速度:納秒級延遲,適合高速精密加工。
應用場景:
微小工件(如電池極耳)的精密焊接、半導體封裝焊點檢測。
技術對比與選型建議
| 傳感器類型 | 精度 | 速度 | 適用場景 | 成本 |
|---|---|---|---|---|
| 激光位移傳感器 | ±0.01mm | 高 | 常規焊縫高度跟蹤 | 低 |
| 激光測距傳感器 | ±1mm | 中 | 大型結構件全局定位 | 中 |
| 二維激光傳感器 | ±0.1mm | 高 | 復雜坡口輪廓重建 | 高 |
| 激光位敏傳感器 | ±0.2μm | 極高 | 微焊接與精密檢測 | 極高 |
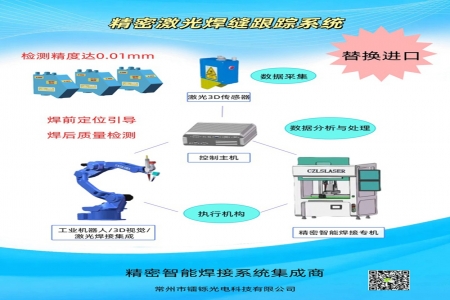
在焊縫跟蹤系統中的集成應用
多傳感器融合:
二維激光傳感器掃描焊縫輪廓,結合位移傳感器實時補償焊槍高度,提升復雜軌跡跟蹤精度。
激光測距傳感器與視覺傳感器互補,解決強反光金屬表面的測量盲區。
動態參數調整:
根據實時測量的焊縫間隙,自動調節焊接電流、送絲速度,避免焊穿或未熔合。
質量閉環控制:
將傳感器數據與焊接過程參數(如熔池圖像)融合,利用AI算法預測焊縫缺陷(氣孔、咬邊)。
通過以上激光傳感技術的協同工作,現代焊縫跟蹤系統能夠實現從宏觀定位到微觀成形的全流程精準控制,成為智能制造中不可或缺的核心單元。